86-755-88844016
+852 2632 9637


Image shown is a representation only.
Exact specifications should be obtained from the product data sheet.
GY953 IMU Nine Axis Attitude Sensor Tilt Compensation 3D Electronic Compass Compass Module
GY953 AHRS module electronic compass with tilt compensation module
Module size: 15.5mm * 15.5mm
Communication methods, 1. Serial port (9600115200), 2. SPI communication (4-wire)
Power supply: 3v-5v 15ma
Output update frequency 200Hz,
Resolution 0.1 degrees
Direct output:
1. YAW Roll PITCH
2. Raw data of nine axis sensors (three-axis acceleration, three-axis gyroscope, three-axis magnetometer)
3. Four element output
Equipped with sensor calibration command
With a magnetometer, the heading angle does not drift
There is upper computer software available
Existing data reading programs (serial port and SPI): 51 microcontroller, STM32, ARDUINO
---------------------------------
2016.8.1
Two new serial port instructions have been added, making it convenient for customers who need to power on and automatically output:
A5 AD 52-------- Save automatic output flag settings (power-off save)
A5 AC 51--- Clear automatic output flag setting (power off save)
Explanation:
1. Save automatic output flag settings:
After powering on and sending the automatic output command (A5 45 EA), then sending the save automatic output flag setting (A5 AD 52).
After the next power on, it will be in automatic output mode without the need to issue any commands.
In this mode, the original automatic output command switch function will not work.
2. Clear automatic output flag setting:
When in the "automatic output flag setting", data is automatically output every time the power is turned on. To turn off the power on automatic output,
To use query mode, an instruction (A5 AC 51) needs to be sent. When powered on again, it is no longer in automatic output mode.
----------------------------------------------------------
Convert the original data to actual units, please note that there are ±:
Acceleration sensor (g)=raw acceleration data/16383
Gyroscope sensor (degrees/second)=Gyroscope raw data/16.4
Magnetic field sensor (uT)=magnetic field raw data/6.7
---------------------------------------------------------
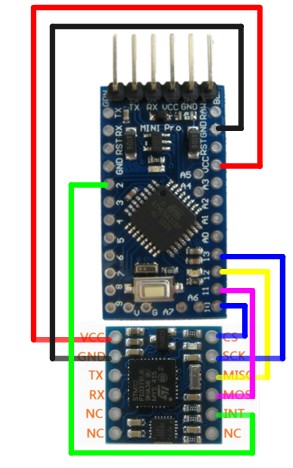
ARDUINO SPI wiring diagram:
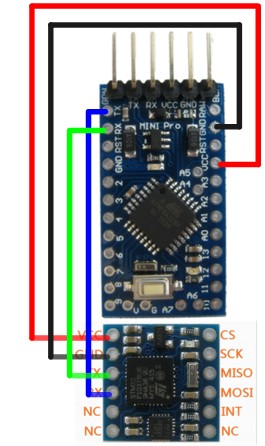
ARDUINO serial port wiring diagram:







We also provide :
| Part No | Manufacturer | Date Code | Quantity | Description |
| LM22676ADJ | NS | 19+ | 250 | SOP8 |
| TPS562201DDCR | TI | 22+ | 795500 | SOT23-6 |
| NJG1806K75 | JRC | 22+ | 500000 | DFN6 |
| TLV74318PDQNR | TI | 22+ | 402000 | X2SON-4 |
| NJG1801K75 | JRC | 22+ | 300000 | SMD |
| NJG1804K64 | JRC | 22+ | 300000 | DFN8 |
| LM27761DSGR | TI | 22+ | 151000 | WSON8 |
| TLV62565DBVR | TI | 22+ | 138000 | SOT23-5 |
| TPS613222ADBVR | TI | 22+ | 108000 | SOT23-5 |
| LNK625DG-TL | POWER | 22+ | 100000 | SOP-8 |
| OPA4322AIPWR | TI | 22+ | 100000 | TSSOP14 |
| TLV75528PDRVR | TI | 22+ | 99000 | WSON-6 |
| TPS7A2025PDQNR | TI | 22+ | 78500 | X2SON-4 |
| TLV62568DBVR | TI | 22+ | 72000 | SOT23-5 |
| STM32L051K8U6TR | ST | 22+ | 60000 | QFN32 |
| SKY66421-11 | SKYWORKS | 22+ | 56500 | QFN16 |
| TPS7A1111PDRVR | TI | 22+ | 54000 | WSON6 |
| TLV62569PDDCR | TI | 22+ | 52000 | SOT23-6 |
| TLV62569DBVR | TI | 22+ | 48000 | SOT23-5 |
| TPS23753APWR | TI | 22+ | 40000 | TSSOP14 |
| NB691GG-Z | MPS | 22+ | 30000 | QFN |
| SN74AHC1G02DBVR | TI | 22+ | 27939 | SOT-23 |
| TPS63000DRCR | TI | 22+ | 23238 | VSON10 |
| TLV75533PDRVR | TI | 22+ | 21500 | WSON6 |
| NB687BGQ-Z | MPS | 22+ | 20000 | QFN |
| A3916GESTR-T-1 | ALLEGRO | 22+ | 17150 | QFN-20 |
| TPS62135RGXR | TI | 22+ | 15000 | VQFN11 |
| TLE2022AMDR | TI | 0803+ | 12500 | SOP8 |
| TPS23756PWPR | TI | 22+ | 12000 | HTSSOP-20 |

GY953 IMU Nine Axis Attitude Sensor Tilt Compensation 3D Electronic Compass Compass Module
SEND
RFQ