Image shown is a representation only.
Exact specifications should be obtained from the product data sheet.
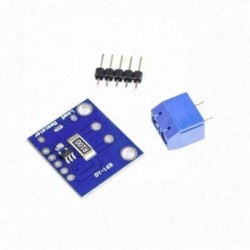
Intelligent car speed measurement module
This product adopts a slot type photoelectric sensor, which consists of an infrared light-emitting diode and an NPN phototransistor, with a slot width of 5.9mm. As long as the non transparent object passes through the slot, it can trigger the output TTL low level. Using Schmitt trigger to shake pulses, it is very stable and can be used for applications such as measuring speed and distance of small cars. It has M3 screw holes on both ends.
Connect VCC and GND, the module signal indicator light will light up, and when there is no obstruction in the block slot, the receiving tube will conduct, and the module OUT will output a high level; When obstructed, OUT outputs a low level and the signal indicator light goes off. The OUT module can be connected to a relay to form a limit switch or an active buzzer module to form an alarm. The OUT output interface can be directly connected to the I0 port of the microcontroller, usually connected to an external interrupt to detect if the sensor is obstructed. If a motor encoder is used, the motor speed can be detected.
Program Design
The OUT port of the speed measurement module is connected to the external interface of the MCU, which acts as an external buffer whenever infrared radiation conducts.
Logic design
Measure distance
The output of the speed sensor is a pulse signal, with one pulse interrupted once; When the infrared radiation is conducting, it is at a low level, so we did not set it to interrupt and trigger the low-level mode. Generally, there are integer cells on a code wheel, and the principle is the same whether there are 10 empty cells, such as a 10 cell code wheel. That is to say, there are 10 empty cells, and after the motor rotates, the radiation conducts 10 times and the external low level triggers 10 times. Following the idea of using the machine, our measuring point sensor can be effective. We know that there are 10 interruptions in one circle, so we calculate the number of interruptions. The total number obtained is divided by 10, which is the number of motor rotations. Then, based on the circumference of the wheel, we calculate how long the wheel completes one circle, and we can calculate how far the car has traveled.
Measure speed
Following the distance measurement approach, we use an MCU timer to calculate how many external interrupts are received within one second. For example, if we receive 20 external interrupts within one second, we can determine that the speed of the car is 2 revolutions per second. Then, we calculate the circumference of the car wheels to obtain the speed at which the car travels in one second.

Connect the wires correctly and do not reverse the positive and negative connections, as this may cause the electronic components on the board to burn out. Arduino players should set the I/O port of the MCU to input/receive mode, otherwise it cannot be used. Other MCUs, or more advanced control boards such as ARM, must set the I/O port to input/output mode, otherwise it cannot be used. The 51 series microcontroller can be used directly without setting input/output modes.









We also provide :
| Part No | Manufacturer | Date Code | Quantity | Description |
| LM22676ADJ | NS | 19+ | 250 | SOP8 |
| TPS562201DDCR | TI | 22+ | 795500 | SOT23-6 |
| NJG1806K75 | JRC | 22+ | 500000 | DFN6 |
| TLV74318PDQNR | TI | 22+ | 402000 | X2SON-4 |
| NJG1801K75 | JRC | 22+ | 300000 | SMD |
| NJG1804K64 | JRC | 22+ | 300000 | DFN8 |
| LM27761DSGR | TI | 22+ | 151000 | WSON8 |
| TLV62565DBVR | TI | 22+ | 138000 | SOT23-5 |
| TPS613222ADBVR | TI | 22+ | 108000 | SOT23-5 |
| LNK625DG-TL | POWER | 22+ | 100000 | SOP-8 |
| OPA4322AIPWR | TI | 22+ | 100000 | TSSOP14 |
| TLV75528PDRVR | TI | 22+ | 99000 | WSON-6 |
| TPS7A2025PDQNR | TI | 22+ | 78500 | X2SON-4 |
| TLV62568DBVR | TI | 22+ | 72000 | SOT23-5 |
| STM32L051K8U6TR | ST | 22+ | 60000 | QFN32 |
| SKY66421-11 | SKYWORKS | 22+ | 56500 | QFN16 |
| TPS7A1111PDRVR | TI | 22+ | 54000 | WSON6 |
| TLV62569PDDCR | TI | 22+ | 52000 | SOT23-6 |
| TLV62569DBVR | TI | 22+ | 48000 | SOT23-5 |
| TPS23753APWR | TI | 22+ | 40000 | TSSOP14 |
| NB691GG-Z | MPS | 22+ | 30000 | QFN |
| SN74AHC1G02DBVR | TI | 22+ | 27939 | SOT-23 |
| TPS63000DRCR | TI | 22+ | 23238 | VSON10 |
| TLV75533PDRVR | TI | 22+ | 21500 | WSON6 |
| NB687BGQ-Z | MPS | 22+ | 20000 | QFN |
| A3916GESTR-T-1 | ALLEGRO | 22+ | 17150 | QFN-20 |
| TPS62135RGXR | TI | 22+ | 15000 | VQFN11 |
| TLE2022AMDR | TI | 0803+ | 12500 | SOP8 |
| TPS23756PWPR | TI | 22+ | 12000 | HTSSOP-20 |

Intelligent car speed measurement module
SEND
RFQ